")

")




")



{kind=link}

Definizione
Sistemi dotati di un numero di vincoli superiori a quelli strettamente necessari per garantire l’equilibrio, per cui sono sistemi strutturali staticamente indeterminati, cioè la cui soluzione non è possibile sulla base delle sole equazioni di equilibrio. In realtà esistono strutture iperstatiche per eccessivo numero di vincoli esterni e strutture (corpi) che sono dotati di iperstaticità interna, ovvero di un numero di “collegamenti” interni tali per cui, anche conoscendo tutte le azioni (forze) che agiscono sul loro contorno, non è possibile individuare gli stati tensionali interni.
In genere l’equilibrio interno di un corpo elastico è un problema iperstatico in quanto le sole equazioni di equilibrio non sono sufficienti a determinare le 6 componenti del tensore degli sforzi nei punti materiali del corpo. Si devono quindi aggiungere ulteriori equazioni relative alla congruenza della deformazione e al legame costitutivo. In particolare, la congruenza è descritta da equazioni differenziali che legano il campo di spostamenti con le componenti del tensore di deformazione, mentre il legame costitutivo è la relazione fra componenti di tensione e di deformazione. Usando quindi i tre “ingredienti” – equilibrio tra le forze, congruenza della deformazione e legame costitutivo – il problema iperstatico è risolvibile.
Sono in generale iperstatiche le strutture bidimensionali (lastre e gusci), a meno del caso di regime membranale. Di maggiore interesse è il caso dei sistemi di travi. Per questi la condizione di iperstaticità è valutata sulla base del numero g di gradi di libertà del sistema e della valenza complessiva v dei vincoli. Se v è maggiore di g il sistema è iperstatico e sono quindi necessarie v – g equazioni aggiuntive a quelle di equilibrio per risolvere la struttura. Se v è uguale a g il sistema è isostatico, se v è minore di g il sistema ha possibilità di movimento e quindi è labile. Nel caso di sistemi piani di travi (asse geometrico e forze agenti appartenenti ad uno stesso piano) g è pari a 3n dove n è il numero di travi.
Risoluzionie dei problemi di equilibrio
Storicamente la prima soluzione tecnica di strutture iperstatiche è attribuita a Navier (1836) e Clapeyron (1857), i quali si occuparono del problema iperstatico di una trave continua su più appoggi, ovvero composta da più campate. La motivazione del problema della trave continua iperstatica è riconducibile alla costruzione di due celebri ponti per la linea ferroviaria Londra-Chester-Holyhead: si tratta dei ponti tubolari metallici Conway e Britannia su fiume e stretto Menai rispettivamente. In particolare il secondo attirò l’attenzione per il suo schema statico, riconducibile ad una trave continua su quattro campate cioè ad un sistema 3 volte iperstatico (ogni campata in aggiunta alla prima, infatti, aumenta di una unità il grado di iperstaticità; una trave di 4 campate è 3 volte iperstatica essendo g = 3 e v = 1+1+1+1+2 = 6).
Il problema studiato da Navier, della trave su più di due appoggi, si presta per comprendere l’essenza dell’iperstaticità. Se prendiamo appunto la trave isostatica su due appoggi, si comprende facilmente come la forza in mezzeria si trasferisca metà su un appoggio e metà sull’altro. Se togliamo un appoggio la trave risulta labile (ovvero può muoversi e quindi può essere in equilibrio solo per particolari condizioni di carico). Se aggiungiamo un appoggio in mezzeria è evidente che non è più immediata la soluzione statica. Le tre reazioni dipendono dalla deformabilità degli appoggi e della trave. Ad esempio se l’appoggio centrale è cedevole rispetto agli altri, non sarà di aiuto e la forza si distribuirà ancora in parti uguali sui due appoggi estremi. Se invece l’appoggio intermedio fosse perfettamente rigido e cedevoli fossero gli appoggi estremi, la forza si trasferirebbe tutta direttamente sull’appoggio mediano. In altre parole, la soluzione non dipende solo da considerazioni (equazioni) di equilibrio ma anche da considerazioni (equazioni) di congruenza delle deformazioni. Il problema, in pratica, nasce, nella storia dell’architettura, nel momento in cui l’introduzione delle strutture di ferro rivoluziona le forme delle costruzioni.
Le strutture iperstatiche possono essere risolte con diversi metodi. La risoluzione consiste nel determinare quelle che vengono chiamate incognite iperstatiche. Note queste incognite il problema è ricondotto alla risoluzione di una struttura isostatica, tramite le equazioni di equilibrio, in cui le forze agenti sono le forze attive, le forze reattive e le incognite iperstatiche precedentemente determinate.
Un metodo di soluzione è quello basato sull’applicazione del principio dei lavori virtuali ai sistemi deformabili. Secondo tale principio vale l’uguaglianza del lavoro virtuale esterno con il lavoro virtuale interno, se questi lavori sono prodotti da un sistema di forze-tensioni (azioni interne) in equilibrio e da un sistema spostamenti-deformazioni congruente. Si opera rendendo la struttura isostatica; ad esempio per una trave singola con incastro e appoggio immagino di eliminare l’appoggio evidenziando come incognita iperstatica X la reazione dell’appoggio. A questo punto il sistema spostamenti-deformazioni congruenti è quello reale prodotto dalle forze esterne agenti e dalla incognita iperstatica X (in questa fase gli spostamenti e le deformazioni della trave sono valutati sulla base del comportamento lineare elastico della trave stessa soggetta alle azioni interne di N, T e M). Il sistema di forze-tensioni in equilibrio è quello ausiliario prodotto dalla forza X presa unitaria sulla trave. Nel lavoro virtuale esterno compaiono i prodotti di forze (del sistema ausiliario) per spostamenti (del sistema reale), mentre nel lavoro virtuale interno compaiono degli integrali in cui si sommano i contributi infinitesimi per ciascuno concio di trave del lavoro prodotto dalle azioni interne (del sistema ausiliario) per le rispettive deformazioni (del sistema reale). Si ottiene così un’equazione lineare nell’incognita X. Se la struttura è più volte iperstatica si scriveranno un numero di equazioni dei lavori virtuali pari al numero di incognite iperstatiche, equazioni che vengono scritte considerando come sistemi ausiliari quelli in cui un’incognita iperstatica alla volta è posta unitaria e le altre incognite iperstatiche uguali a zero.
Un altro metodo di soluzione è quello basato sull’applicazione del teorema di Castigliano (che si specializza nel teorema di Menabrea). Secondo tale teorema, la derivata del lavoro di deformazione della struttura (corrispondente all’energia elastica immagazzinata nella struttura) fatta rispetto a una forza generalizzata (forza o momento) è uguale allo spostamento (traslazione o rotazione) nella direzione della forza generalizzata stessa; nel caso in cui la forza considerata sia un’incognita iperstatica X, se il vincolo è perfetto, cioè non soggetto a cedimenti, la derivata del lavoro di deformazione è uguale a zero. In questo modo si ottiene, analogamente al metodo basato sul principio dei lavori virtuali, una equazione lineare nell’incognita X.
Dal principio dei lavori virtuali derivano i due metodi di soluzione più comunemente adottati per la risoluzione delle strutture iperstatiche: il metodo delle forze ed il metodo degli spostamenti. Con il metodo delle forze si ottengono delle equazioni di congruenza espresse in termini di forze incognite, con il metodo degli spostamenti invece si ottengono equazioni di equilibrio espresse in termini di spostamenti incogniti. Il primo ha storicamente origini più antiche, mentre il secondo è particolarmente idoneo ad essere espresso in termini matriciali e quindi ad essere implementato in programmi di calcolo (si pensi al metodo degli elementi finiti, in cui comunemente le incognite del problema sono gli spostamenti in nodi tramite cui è stato approssimato il problema).
Entrambi i metodi delle forze e degli spostamenti si prestano ad essere utilizzati per la risoluzione manuale (oggi largamente sostituita dal calcolo automatico tramite computer) di strutture (sistemi di travi) ad un numero relativamente elevato di gradi di libertà. Nell’applicazione di questi metodi sono di uso comune tabelle reperibili nei manuali tecnici che forniscono, per travi singole diversamente vincolate e schemi di carico elementari, gli spostamenti prodotti da forze unitarie (cedevolezze) o le forze che producono spostamenti unitari (rigidezze).
Il metodo delle forze è tradizionalmente impiegato per la risoluzione di travi continue su più appoggi in cui le incognite statiche sono i momenti negli appoggi. Il metodo degli spostamenti è invece di comune impiego nella risoluzione di strutture a telaio in cui le incognite cinematiche sono le rotazioni e, nel caso di telai non controventati (chiamati a nodi mobili), le traslazioni dei nodi. Esistono inoltre metodi di risoluzione iterativi (oggi in disuso, grazie al calcolo automatico delle strutture) di strutture iperstatiche quali il metodo di Cross, di Kani ecc.
Qualità specifiche
Le strutture iperstatiche, al contrario di quelle isostatiche, sono sensibili alle variazioni termiche o ai cedimenti (ad esempio i cedimenti differenziali di fondazione). In presenza di un carico termico, di un cedimento o di altre coazioni anelastiche (ad esempio legate a tolleranze di esecuzione o di montaggio nelle strutture metalliche) infatti, nascono delle sollecitazioni interne (azione assiale, momento o taglio) anche se la struttura non è soggetta a carichi esterni. Ad esempio, una variazione termica uniforme positiva in una trave vincolata assialmente provoca una azione assiale di compressione, mentre una variazione termica a farfalla (lineare lungo l’altezza della trave), nel caso di una trave con vincoli alla rotazione induce un momento. In generale le azioni interne nelle strutture iperstatiche sono funzione dei moduli di elasticità (e quindi del materiale) della struttura stessa.
Esempi di travi iperstatiche semplici sono la trave con doppio incastro, la trave con incastro e appoggio e la già citata trave continua su più appoggi. Il caso più rilevate è poi quello delle strutture a telaio in cui il grado di iperstaticità è in genere elevato (all’iperstaticità dei vincoli esterni – in genere i pilastri che compongono il telaio si assumono incastrati alla base – si aggiungono le iperstaticità interne dovute alle maglie chiuse – ciascuna maglia è 3 volte iperstatica). Le strutture reticolari a maglie triangolari e con le aste incernierate nei nodi, sono, invece, in genere, isostatiche, anche se esistono strutture reticolari iperstatiche o ad arco iperstatiche.
In ambito sismico, un esempio rilevante di sistema iperstatico, e nello stesso tempo illuminante per capire la distribuzione delle forze nelle strutture iperstatiche, è quello della ripartizione delle forze sismiche orizzontali di piano sugli elementi verticali di controvento. Nell’ipotesi di solaio rigido (comportamento a diaframma) la ripartizione della forza sismica sugli elementi verticali si configura come un problema iperstatico. Considerando per semplicità una distribuzione simmetrica in pianta degli elementi di controvento, si ha uno spostamento orizzontale del solaio per cui la forza sismica si ripartisce sugli elementi verticali in funzione della loro rigidezza: più l’elemento è rigido più è grande la forza di ripartizione sull’elemento stesso. Si osserva che l’eventuale iperstaticità di una struttura è legata al comportamento del materiale che la costituisce e alle condizioni di carico agenti. Ad esempio le strutture in muratura sono apparentemente molto iperstatiche, in quanto costituite da sistemi scatolari formati da “lastre” piane. In realtà, la modesta resistenza a trazione e la conseguente presenza di (micro o macro) fessurazioni le può trasformate in sistemi isostati o labili, in cui la struttura resistente è funzione delle forze agenti. Un esempio semplice è il pilastro sottoposto a carico eccentrico, esterno al nocciolo centrale d’inerzia. Il pilastro si fessura da una parte o dall’altra in funzione della posizione fella forza agente e quindi la sezione resistente cambia.
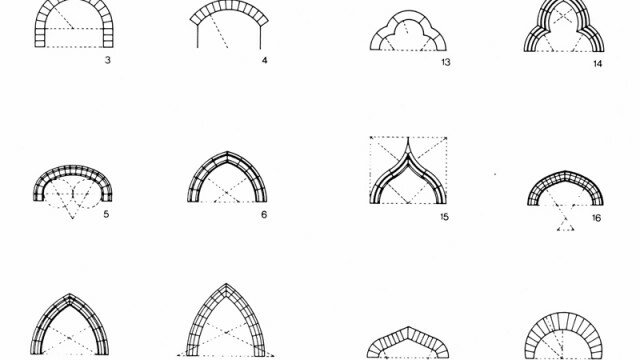
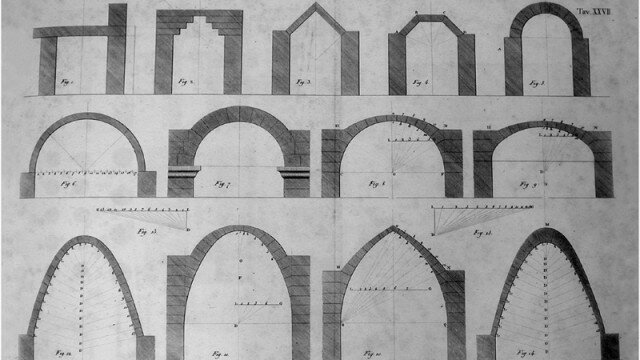
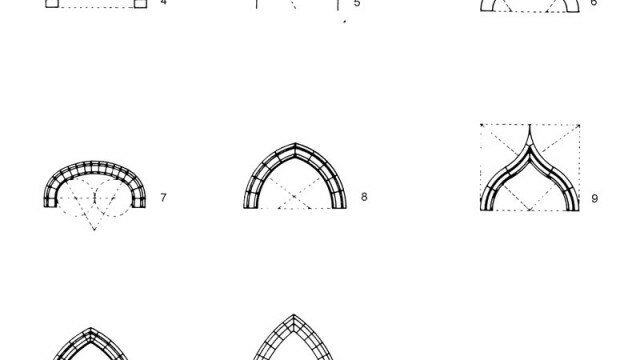
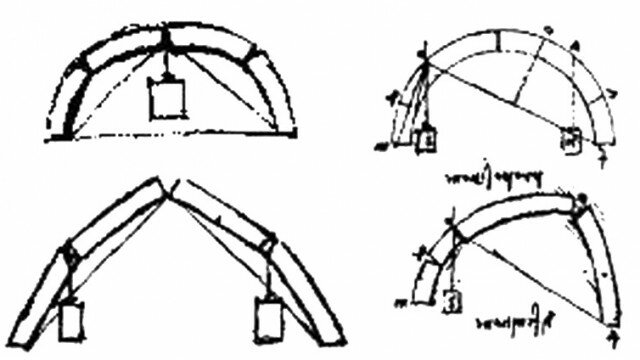
Simili problematiche sono presenti nell’arco in muratura: la struttura si presenta come una struttura tre volte iperstatica, in quanto sembra costituita da una asta curva incastrata alle due estremità. In realtà le esperienze pratiche di Mery (risalenti all’inizio del XIX secolo) dimostrarono come negli archi si formino delle fessurazioni che riducono in pratica gli archi in muratura, in funzione della loro forma e dei carichi, a strutture isostatiche e quindi risolvibili con sole considerazioni di equilibrio.
Le strutture iperstatiche hanno il vantaggio di avere in qualche modo una riserva aggiuntiva, se comparate a quelle isostatiche, nei confronti della ‘resistenza’ alla labilità cioè allo sviluppo di un meccanismo di collasso. D’altro canto hanno il già citato svantaggio di sviluppare sollecitazioni interne per la presenza di spostamenti o deformazioni anelastiche. Pertanto le strutture iperstatiche, se pure dotate di un numero sovrabbondante di vincoli, in generale non possono essere considerate per questo più affidabili delle strutture isostatiche. Nei casi in cui le strutture sono sottoposte a sistemi deformativi imposti dall’esterno, la notevole rigidezza delle strutture iperstatiche risulta penalizzante dato che può creare all’interno delle strutture coazioni anche di notevoli entità. In tali casi è preferibile utilizzare strutture isostatiche. Un esempio è quello delle strutture soggette a variazioni termiche consistenti: tali strutture devono essere isostatiche e dotate di giunti che permettano le deformazioni altrimenti incontenibili. Gli impalcati dei ponti sono dotati di giunti che ne interrompono la continuità. Un ulteriore esempio è quello delle strutture che possono essere soggette a cedimenti differenziati come i ponti su più campate. Le travi da ponte con cerniere che le rendono isostatiche sono dette “travi Gerber”.
Photogallery





Copyright © - Riproduzione riservata