")

")




")



{kind=link}

Etimologia – Definizione
Strumento elettro-ottico meccanico che permette la misurazione tridimensionale digitalizzata e discreta di oggetti attraverso l’analisi della variazione fra l’emissione di raggi laser e l’immissione dei medesimi riflessi dall’elemento investito. Agli inizi degli anni Novanta alcuni studiosi americani applicarono la tecnologia laser per il rilievo delle raffinerie petrolifere creando strumenti sofisticati ed efficienti che nel tempo hanno trovato ampio utilizzo nel rilevamento architettonico. Etimologicamente deriva dal dizionario anglosassone, parola composta da laser, acronimo di Light Amplification by Stimulated Emission of Radiation amplificazione della luce da emissione stimolata di radiazione, e scanner, traduzione di scansione, termine latino, p.p. di scando scandire, traslitterazione del greco schazo incidere, aprire, etimo anche della parola «schedare». Sono usati come sinonimi scanner 3D, e la traslitterazione italiana scansione laser, mentre il Laser Scanning e 3D Object Scanning è l’azione di presa.
Applicazione in architettura
Il laser scanner ha rivoluzionato l’acquisizione di dati tridimensionali, in quanto a differenza delle tradizionali tecniche di acquisizione di dati, la registrazione automatica e non invasiva del laser scanner consente una fitta scansione delle superfici dell’oggetto in esame in un intervallo di tempo relativamente breve, con la presa di migliaia di punti al secondo.
I laser scanner utilizzati per il rilievo architettonico sono riconducibili a tre diverse soluzioni tecnologiche:
- Tempo di volo (TOF, Time of Flight) – Lo scanner emette un segnale laser che raggiunge l’elemento da rilevare e una certa porzione del raggio è riflessa verso lo strumento che è in grado di riceverlo calcolando la distanza in base al tempo di ritorno. La conoscenza degli angoli zenitali e azimutali del raggio emesso costituisce il riferimento nel sistema di coordinate sferiche che permette di determinare l’esatta collocazione del punto rilevato in un sistema relativo che poi può essere georeferenziato.
- Variazione di fase – Il funzionamento del laser scanner che impiega il sistema di misurazione a modulazione di fase, è simile a quello a tempo di volo, ma il segnale non è emesso con elementi consecutivi, ma in maniera continua con una lunghezza d’onda nota, così che lo strumento non calcola il tempo di ritorno quanto la variazione nell’onda sinusoidale. L’analisi di tale valore, in termini pratici, permette di rilevare un oggetto con una maggiore velocità in proporzione al tempo impiegato per effettuare la scansione, con il range di azione che però si riduce nell’ordine di 100 m.
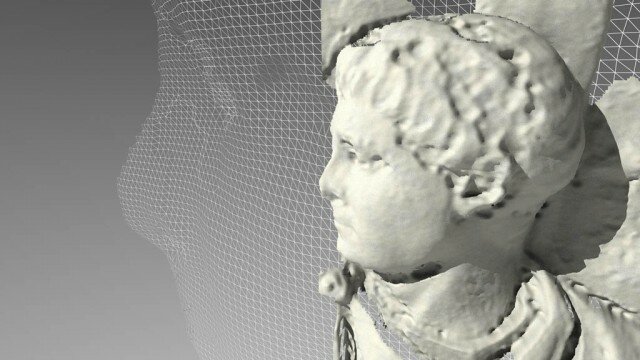
- Triangolazione – Per la restituzione digitale di oggetti di piccole dimensioni gli scanner laser a triangolazione ottica operano con un dettaglio massimo inferiore al mezzo millimetro in una portata massima di pochi metri. Applicando il processo di triangolazione proprio della topografia, l’emettitore e il ricevitore costituito da una telecamera a CCD (Charge Coupled Device) definiscono la base nota dalla quale è possibile calcolare l’insieme dei profili paralleli di un oggetto che forniscono l’informazione necessaria per la realizzazione di un modello tridimensionale. La nuvola di punti tridimensionali (point cloud) che è così create in forma digitale, con un passo quadrato o rettangolare che varia da pochi millimetri a qualche centimetro, consente di realizzare un clone virtuale funzionale a diverse tipologie di applicazione, punti che sono poi interpolati con piccole superfici semplici (mesh). Il modello tridimensionale così creato permette di acquisire un’altissima quantità di misure metriche dell’oggetto del rilievo, tanto che il problema conoscitivo del rilievo si sposta dall’oggetto al clone digitale imponendo la necessità di selezionare i punti rilevati e di determinare quali siano veramente indispensabili per la resa e la giusta interpretazione dell’oggetto. Il rilievo tridimensionale fornisce le tre coordinate del punto rilevato e il valore della riflettanza, analisi del materiale che rappresenta la capacità dei corpi di riflettere il raggio laser e che pertanto fornisce informazioni sul differente comportamento delle superfici analizzate, con possibili applicazioni per il restauro.
Nel rilevamento con laser scanner, le fasi possono essere sintetizzate in presa della misure, processamento dei dati, estrazione dei dati e rappresentazione:
- La presa dei dati avviene montando su un treppiedi dotato di livella il laser scanner collegato alle batterie e programmato con un computer esterno. La posizione dello strumento per ogni punto di stazione (scanworld) permette la scansione del soggetto analizzato che avviene attraverso una proiezione conica e che pertanto non potrà quasi mai prendere tutti i punto dell’oggetto che in parte saranno nascosti da zone d’ombra (gaps) determinate da porzioni aggettanti (cornicioni, falde, balconi…). Per le diverse stazioni, i parametri da impostare sono il movimento dello strumento e la risoluzione della scansione alla distanza di riferimento assegnata, fattori da cui dipendono la quantità di punti catturati, la velocità di scansione e quindi l’accuratezza del modello e che sono condizionati dalla scala di restituzione grafica che si intende ricavare. Alla fine di ogni scansione, i dati vengono registrati o sul pc interno di cui è dotato lo scanner o su una scheda di memoria e poi trasferiti, ma in generale è garantita un’immediata visualizzazione. In tale fase risulta di fondamentale importanza la georeferenziazione della nuvola che ne assicuri il suo orientamento assoluto, condizione ottenuta attraverso l’acquisizione di mire di riferimento (target), misurate solitamente anche con una stazione totale, finalizzate quindi a stabilire le griglie plano-altimetriche necessarie inoltre al montaggio (registration) delle differenti scansioni che genericamente possono essere anche più di una. Gli strumenti utilizzati per il rilevamento architettonico sono integrati con una camera digitale che permette poi di caratterizzare il punto un attributo grafico ottenuto dalla mappatura delle immagine sul modello.
- Il processamento avviene una volta acquisiti i dati della scansione, con le informazioni genericamente possono essere tradotte nelle codifiche digitali più comuni nonostante i possibili problemi connessi all’alta densità di informazioni, dell’ordine di milioni di punti. I software di modellazione permettono innanzitutto di effettuare operazioni di filtraggio in modo da eliminare in maniera automatica segnali spuri che forniscono coordinate 3D non corrette, quindi con strumenti di editing consentono di intervenire puntualmente in aree costruendone le geometrie.
- Dal modello devono infine essere estrapolati i dati che determinano la rappresentazione e la conoscenza dell’oggetto analizzato: indipendentemente dalla corrispondenza metrica e dalla congruità dell’immagine conseguita dal processamento, il rilievo impone per sua stessa definizione l’esercizio dell’azione critica e interpretativa, con i dati tridimensionali digitali che devono genericamente essere la base per la costruzione delle rappresentazioni bidimensionali e del modello tridimensionale che ne utilizza i dati sezionati e selezionati ricostruiti con geometrie dedotte.
Bibliografia
Bini M., Battini C. (a cura), Nuove immagini di monumenti fiorentini. Rilievi con tecnologia scanner laser 3D, Città di Castello, 2007; Docci M., Metodi e tecniche integrate di rilevamento per la realizzazione di modelli virtuali dell’architettura della città, Roma, 2007; Docci M., Maestri D., Manuale di rilevamento architettonico e urbano, Roma, 2012; Marbs B., 3D scanning instruments, Corfu, 2002; Migliari R. (a cura), Frontiere del rilievo. Dalla matita alle scansioni 3D, Roma, 2001; Pfeifer N., Briese C., Laser scanning. Principles and applications, Vienna, 2007.
Copyright © - Riproduzione riservata